-
Podstawowy skład robotów przemysłowych
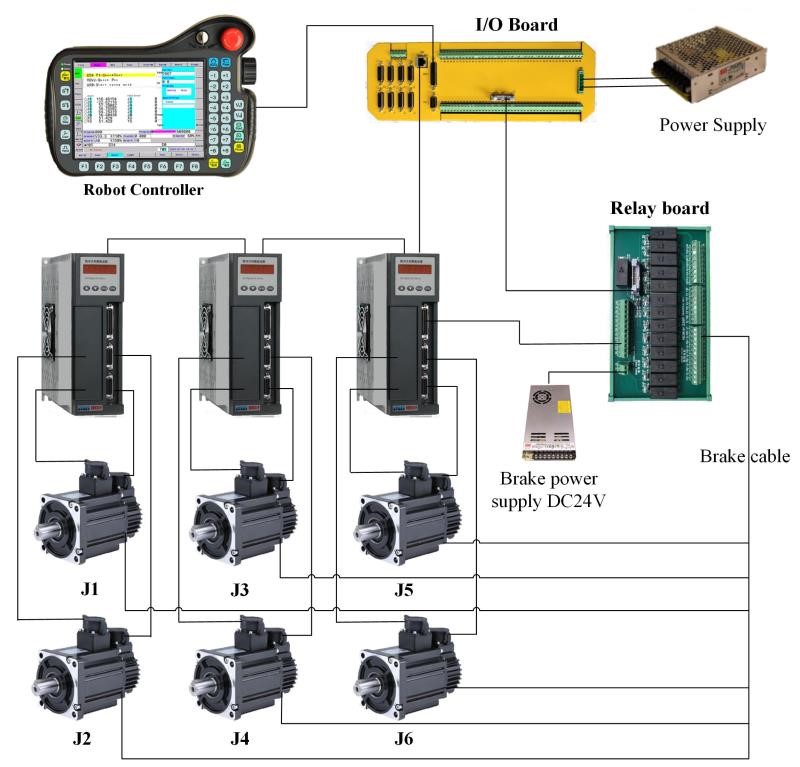
Z punktu widzenia architektury robota można podzielić na trzy części i sześć systemów, z czego trzy części to: część mechaniczna (służąca do wykonywania różnych czynności), część sensoryczna (służąca do postrzegania informacji wewnętrznych i zewnętrznych), część sterująca (sterowanie robotem w celu wykonywania różnych ...Przeczytaj więcej -
Strategia umiejętności programowania centrów obróbczych CNC
W przypadku obróbki CNC programowanie jest bardzo ważne, co bezpośrednio wpływa na jakość i wydajność obróbki. Jak więc szybko opanować umiejętności programowania centrów obróbczych CNC? Uczmy się razem! Polecenie pauzy, G04X(U)_/P_ odnosi się do czasu pauzy narzędzia (zatrzymanie posuwu, wrzeciono ...Przeczytaj więcej -

Siedem najważniejszych trendów technicznych w rozwoju obrabiarek CNC w Chinach.
Aspekt 1: Złożone obrabiarki są w fazie wzrostu. Dzięki potężnym możliwościom sterowania zaawansowanych obrabiarek CNC, coraz bardziej wyrafinowanej technologii projektowania i produkcji oraz coraz dojrzalszej technologii aplikacji, w tym programowaniu, złożone obrabiarki, z ich mocą...Przeczytaj więcej






